
Thinking about other points-of-view is a proven strategy for more clearly defining what a concept is and what it isn’t. The heart of the Socratic Method involves repeatedly changing perspectives along this line. Each dialog employs an operational approach roughly rendered as ‘yes, suppose we look at the matter with this definition, what do we find’. Following this line of questioning diligently and in a disciplined manner strips away more of the accidentals and allows a sharper picture to emerge of the essential nature of the idea in question.
Such an approach is also useful for sharpening the thinking involved in modeling physical or mathematical objects. Steps forward in science, particularly physics, comes about often from a cleaner definition of just what some primitive object involves.
Oddly enough, I had the good fortune to be involved in two separate and unrelated discussions this past week about the essential natures of the points-of-view used to describe the physical world, which, in the physical sciences, are always referred to as reference frames or coordinate systems or some closely similar phrasing. The resulting dialogs certainly helped me to see better what the physical sciences really know about frames and systems of reference.
To set the stage, a disclaimer is in order. As far as I can tell, there is no universal agreement about how to define a reference frame, or how, exactly, it differs from a coordinate system and the associated measurements. This lack of uniform definition points to some deep issue – either epistemological or ontological – about the nature of space and time and how humans perceive these things. One part of the reason seems to be that the operational concepts are so primitive that we have only a basic notion, in many cases, of how to describe it. I liken it to being able to drive a car or ride a bike but yet be unable to describe how to do these things to someone who can’t. But I think that there is an even bigger reason that speaks to how we divide the world up into categories and how we identify the essentials from the accidentals.
To make this last point clearer, let me concretely discuss my definitions of reference frame and coordinate system and then point out how one may logically use these definitions to come up with something akin to a contradiction.
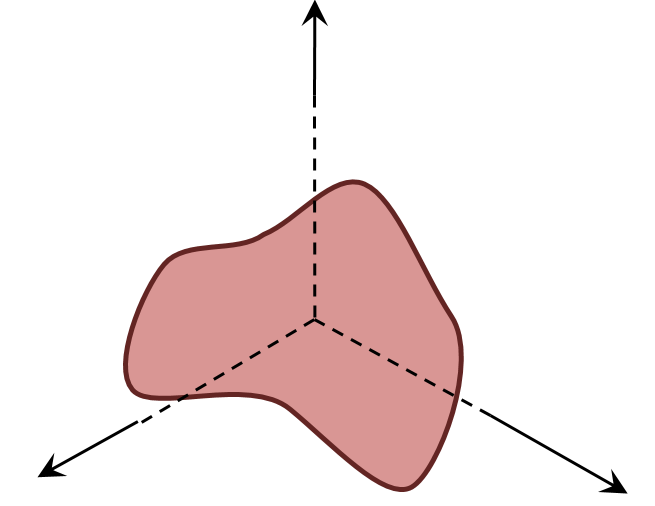
A reference frame is a physical object possessing a point-of-view. The prototype is the human being so defined to have the essential parts of a set of limbs to move about, eyes to look, a mind/brain to process, a mouth to speak the results, and ears to listen. Even when physics speaks about inanimate objects there is, lurking in the background, the notion of what an observer would see were he a disembodied spirit moving along with or sitting upon the object (such is the nature of our imaginations and how we understand the world). A convenient abstraction is that a reference frame is any object that has a definite place, which possesses three (independent) directions that it can use, in combination, to point at something, and which has some measure of scale.
Now suppose something of interest comes into this objects field-of-view. As a reference frame it can point towards the object and can denote how far away the thing of interest is. By convention, our primitive reference frame object will adjust the length of the direction to the thing of interest, making the length of the arrow along the direction longer or shorter in proportion to the distance. Thus we have defined a traditional position vector with respect to our primitive reference frame.
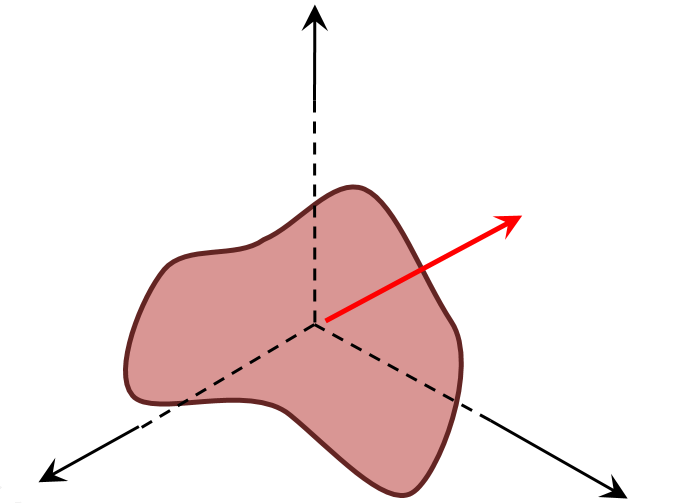
Note that the notions of direction and distance are also primitive concepts with no easy way to define them in terms of other, simpler things. Also note that there are no names for the directions yet nor is there any developed idea of how to specify these directions or distances mathematically.
The next step is to remedy this short coming because being able to measure and compute and reproduce values are vital ingredients to understanding the world. The remedy involves giving the primitive reference frame basic measuring tools. For this discussion, the ruler, the clock, and the protractor will suffice and the generalization to more sophisticated modes shouldn’t be too hard.
Using only rulers, we can decorate the primitive reference frame with a set of planes, each possessing a ruled grid of lines and spaced with a known distance. One such configuration is shown below.
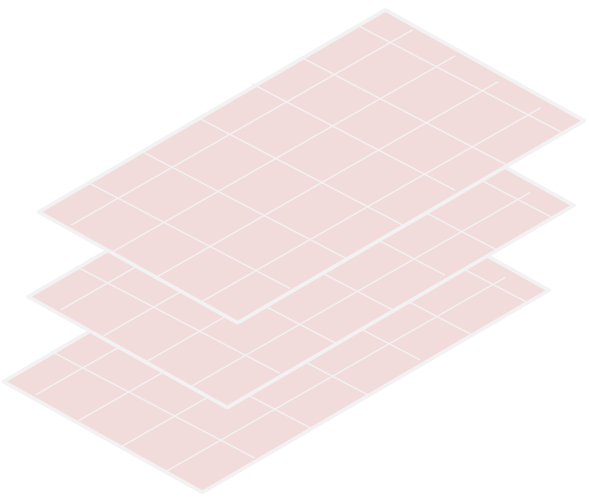
The thing of interest is then specified by the labels specifying on which plane and within which cell is it located. Other objects can be as deftly located and thus we arrive at a coordinate system – an instance of the Cartesian coordinate system to be precise.
Two important things are worth noting. First, in this scheme, the reference frame possesses the coordinate system – we’ll return to this point below. Second, the coordinate system is arbitrary. The planes shown above were oriented so that their edges coincide with the reference frame directions but this choice is no better or worse (at least philosophically) than any other.
Indeed, the whole idea of using planes, regardless of alignment, can be abandoned altogether. Instead, we could have chosen to use concentric spherical shells of different radii with great circles and latitude lines (taken as primitive notions) drawn on them. The protractor is now our tool of choice and the result is the spherical coordinate system. One such shell of one such instance is shown below.
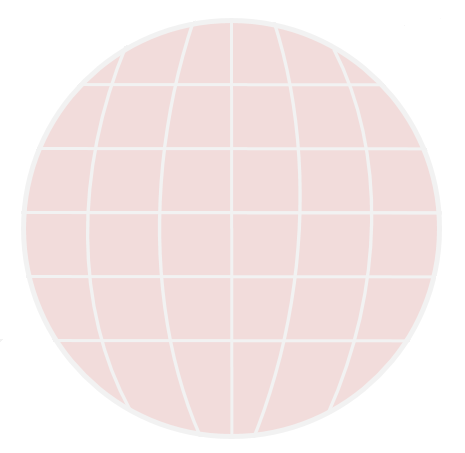
In terms of these shells, the location of the thing of interest would be specified by stating on which shell it lies and by giving the great circle and latitude lines on which it lies. Of course the orientation of the great circles and latitude lines are as equally arbitrary as the alignment of the planes pictured above.
The whole scheme holds up just fine as long as it is being used operationally. The trouble comes when one starts examining it closely with an eye to first principles (yet another point-of-view). Several annoying questions come up which bring into doubt the underlying consistency of the scheme. Some of these are:
- How can the reference frame have a notion of direction and length without first having some notion of how to measure angles and lengths? In other words, which comes first, reference frame or coordinate system?
- What objects are used to find the position and orientation of the first object – are they not also reference frames? There is a Machian idea buried here but no time to worry about that now. It suffices to point out that this ambiguity leads to the perpetual confusion between active and passive rotations.
One might also pose the following question. Since coordinate systems also objects in their own right, with directions determined by lines of constant coordinate value, can’t they also be used as reference frames. My answer to that question is a guarded no. Cartesian coordinates really don’t really have an origin that matters – they are really an affine space – so they aren’t quite the same type of object as the primitive thing we attached directions and an origin to. This observation is also not very solid since the spherical coordinate system has to have an origin upon which the spherical shells are centered. Even this requirement doesn’t prevent it the origin from shifting, it just makes the algebra much harder and since most everyone goes back to Cartesian coordinates to compute it isn’t a strong point.
More troubling is the observation that some origins are devoid of a physical object. For example, the barycenter of two equal mass objects separated by a distance great enough that they don’t touch is located in the empty space between them. Nonetheless, scientists are quite happy to use this mathematical construction as an origin of a reference frame.
So in the final analysis we are left with two basic conclusions. First, it is no wonder that there is no uniformly, accepted definition of the basic terms of reference frame and coordinate system. In some sense they are tightly interconnected and too primitive to define precisely. As long as any scheme works (i.e. give the right numbers) it is operationally sound if not totally logically so. Second, by studying this thorny problem, we can get some insight into just what is knowable and explainable.